


V súčasnom období vývoja nedochádza len ku kombinovaniu strojov po typologickej stránke ale tiež z hľadiska využívania čo najväčšieho počtu stavebných modulov. Snaha do budúcnosti je vytvárať mobilné stroje, ktoré budú zodpovedať nie len bezpečnostnými požiadavkami a funkčnosťou, ale budú dosahovať aj lepšie prevádzkové parametre, napr. vyššie prepravné rýchlosti v kombinovaní s požadovanými pracovnými výkonmi.
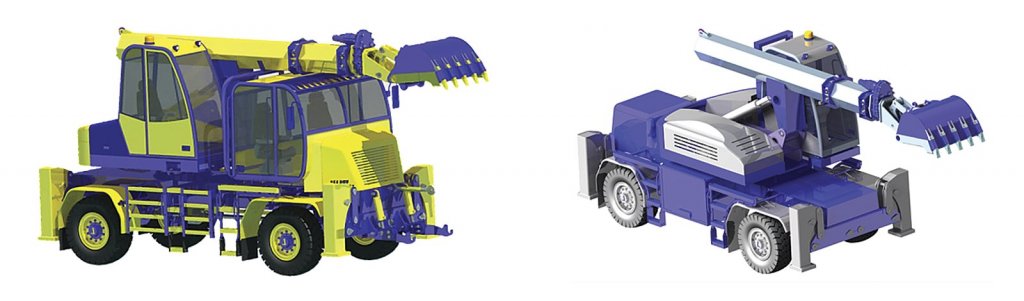
Z dôvodu dosahovania čo najväčšej prepravnej rýchlosti je dnes v popredí snaha o nahradenie sériového automobilového podvozku za samohybný podvozok. Zámerom je zníženie prevádzkových nákladov vrátane cestnej dane a zákonnej poistky. Hlavným cieľom ako zabezpečiť uvedenú skutočnosť je aj návrh prestaviteľnej kabíny, ktorá by bola použiteľná v rôznych polohách. Koncepcie prestaviteľných kabín v súčasnej dobe pri sprísňovaní nárokov na bezpečnosť už nie sú futuristickými dielami. Polohovateľné kabíny sa vyrábajú výškovo prestaviteľné, horizontálne a dokonca aj výklopné. V tejto oblasti návrhov konštrukcie sa presadili firmy ako je Sennebogen, Volvo, Hyundai, Hitachi alebo Caterpillar s koncepciou znázornenou na obr. 2. [1]

Uvedené firmy využívajú polohovateľné kabíny väčšinou len za jedným cieľom, a to – zlepšenie viditeľnosti pri práci. Väčšina konštrukcií na zdvih kabíny je robustná s veľkou hmotnosťou, nevhodnou na prepravu stroja vyššími rýchlosťami. Stroj s takouto kabínou musí disponovať vopred stanovenou stabilitou a dovolenými medznými polohami kabíny. [2]
Vývoj mobilných pracovných strojov na Slovensku je orientovaný okrem iných aj na stroje s označením UDS (univerzálny dokončovací stroj). Tieto stroje sú navrhované v rôznych variantoch s rôznymi pohonnými systémami, pracovnými nástrojmi, výložníkmi či prístupovými sústavami. Pre efektívne využitie týchto strojov ako na pracovisku tak aj na cestných komunikáciách bol navrhnutý v rámci výskumno-vývojového projektu variabilného modulárneho pracovného stroja aj samohybné teleskopické rýpadlo, hmotnostnej kategórie do 18 t. [3]
Stroj disponuje dvomi kabínami prepravnou a pracovnou ako je znázornené na obr. 3. Proces vývoja a inovácie tohto stroja priniesli myšlienku, ktorá predstavovala využitie len jednej kabíny – polohovateľnej vo viacerých smeroch. Dôvodom tohto kroku sú výhody ako zníženie dynamických vplyvov na obsluhu, zníženie nákladov, zníženie hmotnosti stroja, zlepšenie viditeľnosti, stability, pracovných dosahov a to všetko pri zabezpečení vyšších prepravných rýchlostí.
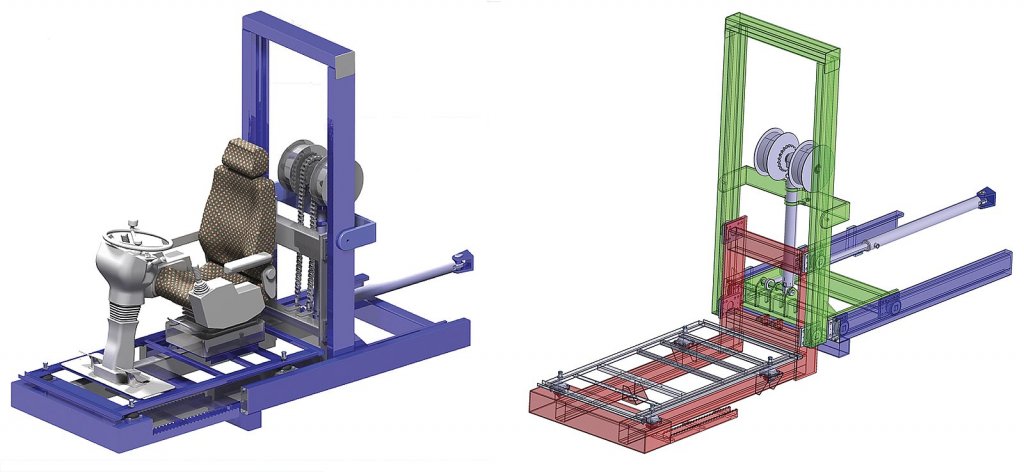
Na obr. 3 je znázornená aj kabína už na renovovanom type stroja z platných predpisov a noriem. Kabína je uložená na mechanizme, ktorý umožňuje pohyb vo vertikálnom aj horizontálnom smere, pričom väčšina hlavných modulov ostáva nezmenená aj po adaptácii mechanicko-hydraulickej konštrukcie.
Konštrukcia sa skladá z dvoch rámových nosičov vyhotovených z bežne dostupných profilov, ktoré sa pohybujú po U-profiloch za pomoci excentricky kombinovaných ložísk. Excentricky kombinované ložiská zvládajú veľké radiálne aj axiálne zaťaženia. U-profily horizontálneho nosiča sú privarené o nadstavbu a vodiace vertikálne U-profily sú súčasťou horizontálneho nosiča. Dvojnásobná výška zdvihu vo vertikálnom smere je zabezpečená za pomoci dvojice valčekových reťazí navrhnutých podľa normy ISO R606. Vertikálny pohyb mechanizmu je označovaný ako „simplex” a bežne sa využíva pri vysokozdvižných vozíkoch obr. 4. [2]
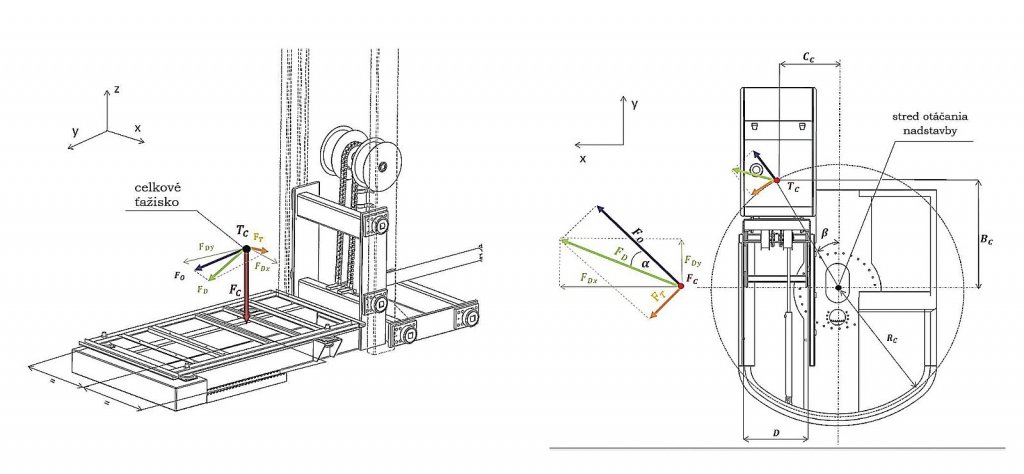
Vo všeobecnosti mechanizmus kabíny zabezpečuje tri možné polohy – prepravnú, pracovnú a polohu so zlepšenou viditeľnosťou ako je znázornené na obr. 5. Pri prepravnej polohe je kabína spustená na podvozok a zastabilizovaná čapom na ráme podvozku. Časť vznikajúcich síl pri pohybe stroja je zachytávaná práve týmto uložením. V pracovnej polohe je kabína zdvihnutá o 240 mm vertikálne a zasunutá spätne na nadstavbu o 900 mm. Pri polohe so zlepšenou viditeľnosťou je zabezpečená flexibilita a teda rôzne rozsahy vysúvania v horizontálnom aj vertikálnom smere v rámci kinematických možností navrhnutého zariadenia.

Pohon obidvoch nosičov je zabezpečený hydrostatickými prvkami. Navrhnuté sú dva priamočiare hydromotory. Z dôvodu zabezpečenia bezpečnosti navrhnutého zariadenia je v systéme navrhnutý ventil, ktorý je pretlakový a riadený preťažením. Ventil chráni hydraulický systém pred zvyšovaním tlaku v hadiciach, čo zabraňuje zlyhaniu systému. Ostatné prvky hydraulického systému pre pohon nadstavby aj pracovného zariadenia sú uložené na pravej strane nadstavby s ohľadom na rovnomerné rozloženie zaťaženia nadstavby.
Medzné stavy, ktorým je mechanizmus vystavený predstavujú statické zaťaženia od vlastných tiaží, dynamické prevádzkové zaťaženia a tiež dynamické zaťaženia, ktoré predstavujú požiadavky skúšok FOPS a ROPS. V procese návrhu stroja sa vychádzalo zo statickej aj dynamickej charakteristiky a to pre dve možné najpravdepodobnejšie situácie ku ktorým bude v procese reálnej prevádzky dochádzať: brzdenie vozidla a otáčanie pracovnej nadstavby, obr. 5. Po zvážení najnepriaznivejších stavov boli následne nadimenzované priemery excentrických ložísk. [2]
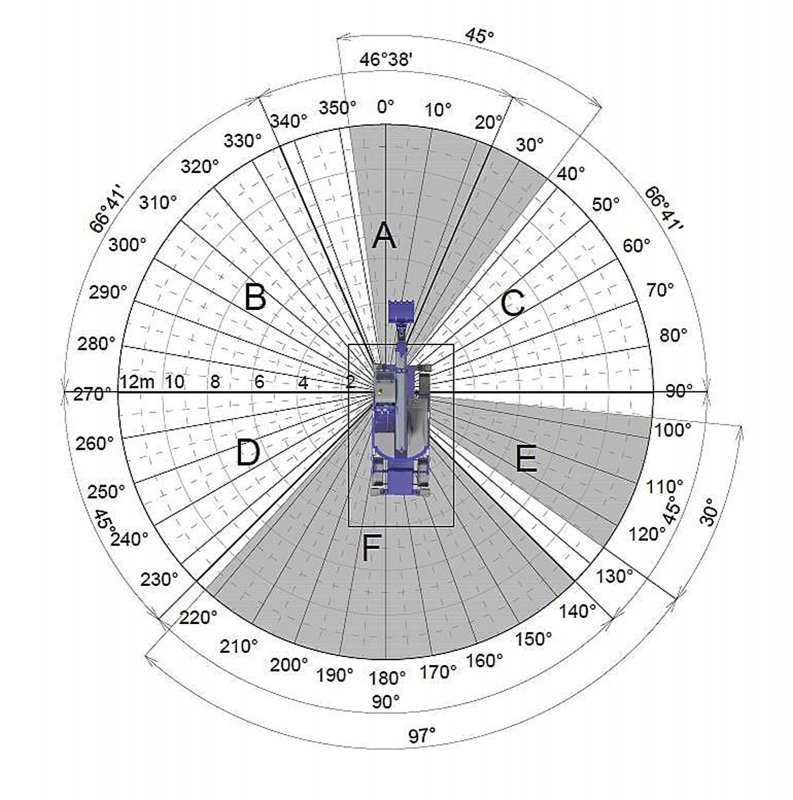
Návrh celkového stroja bol doplnený alternatívou hybridného pohonu V zadnej časti podvozku je uložený spaľovací pohonný motor Perkins s výkonom 106 kW, Stroj disponuje v uvedenej alternatíve pohonu elektromotorom Dana TM4 D s výkonom 250 kW a elektrogenerátorom Dana TM4 HP, s výkonom 205 kW. Časti pohonu sa nachádzajú priamo pod otočnou nadstavbou v podvozkovej časti. Pre úplnosť riešenia problematiky je navrhnuté výsledné dizajnové riešenie spolu s výpočtom stability, určením pracovných dosahov a tiež analýzou výhľadových zón v blízkom aj vzdialenom okolí vodiča v zmysle požiadaviek normy ISO 5006. Výhľadové zóny sa ukázali najvyhovujúcejšie práve v prepravnej polohe kabíny v predných sektoroch ako je znázornené na obr. 7. Stroj možno považovať za stroj novej generácie, ktorý svojou kompaktnosťou a možnosťami poskytuje uvedené výhody a zvýšenie celkovej bezpečnosti stroja a tiež operátora pri zachovaní súčasne platných štandardov. [4]
Literatúra:
- [1] www.cat.com
- [2] CHOVANČÍKOVÁ, Viktória: Koncepčný návrh optimálnej konštrukcie prestavite<0x013E>nej kabíny na otočnej nadstavbe pre samohybný podvozok 4×4. Diplomová práca. Bratislava: Slovenská technická univerzita,2021.93s.
- [3] STN EN 15573:2009: Stroje na zemné práce. Konštrukčné požiadavky na používanie na ceste.
- [4] ISO 5006:2017: Stroje na zemné práce. Zorné pole operátora



