


Pojem kontajnerizácia je definovaný ako zavádzanie kontajnerov alebo účelových dopravných jednotiek z dôvodu zjednodušenia prepravy rôznych druhov tovaru. Teda predstavuje manipulačný a prepravný systém, ktorý využíva kontajnery ako prostriedky na vytváranie väčších integrovaných jednotiek manipulovaných vhodnými mechanizmami [3, 4]. Za účelom objektívneho návrhu manipulačného zariadenia (hákový nakladač – HN) v procese kontajnerizáciebolo potrebné definovať všeobecné a charakteristické typy kontajnerov určené pre HaZZ (hasičský a záchranný zbor), ktoré sú bližšie špecifikované normami STN ISO 830, DIN 30 722 a Vyhláškou Ministerstva vnútra Slovenskej republiky (MV SR) č. 162/2006 Z.z. [4, 5, 6, 7].
V rámci HaZZ je priebeh kontajnerizácie obmedzený nakontajnery (obr. 1a) podľa veľkostnej kategórie, najmä čo sa týka ISO kontajnerov, na 1C, 1CC a 1D z dôvodu limitujúceho využitia ich danej aplikácie v cestnej premávke na nosiče nadstavieb, ide najmä o nosnosti automobilov a ich rozmerové parametre. Výber nosičov nadstavieb bol orientovaný na nákladné autopodvozky 8×8, z dôvodu obmedzených parametrických možností vozidiel 6×6 pri ich stávajúcom širokospektrálnom určení v procese kontajnerizácie. Pri selekcii treba samozrejme akceptovať normy a zákony určujúce hraničné parametre vozidiel, ako sú normy STN 30 0026, STN 30 0024 a Zákon č. 106/2018 Z. z. (zákon o prevádzke vozidiel v cestnej premávke), spolu s aplikáciu konkrétneho typu kontajnera. Aktuálny návrh „hákového nakladača” bol aplikovaný na podvozok MAN TGS 8×8 (obr. 1b). Zmienené vozidlá podľa uvedeného zákona spadajú do kategórie N3 [4, 7].
![Obr. 1b: MAN TGS 8×8 [4, 7].](/images/resized/2023/v06/1024x800-fit/fi-img1.jpg)
Hákové manipulátory (nakladače)
Výber a návrh vhodného typu zariadenia pre potreby HaZZ bol ovplyvnený jeho určením pre konkrétny typ nosiča a pre uvedené typy kontajnerov. Pri výbere manipulačného zariadenia sa uvažovalo medzi viacerými pracovnými mechanizmami, ako ramenové (jednoramenné, dvojramenné), reťazové, žeriavové, lanové a pod. Zhodnotením vlastností jednotlivých druhov zariadení a vymedzených požiadaviek na manipulačné mechanizmy bol návrh orientovaný na ramenové manipulátory, konkrétne na jednoramenné, takzvané „hákové nakladače” [4, 7, 8].
![Obr. 2: Pohyby jednoramenného manipulátora: a) nakladací a vykladací, b) vysýpací [7].](/images/resized/2023/v06/1024x800-fit/fi-img3a4.jpg)
Pri tomto type konštrukcie je rameno manipulačných systémov uložené v pozdĺžnej osi automobilu. Jeho hlavné pohybysú riadené jedným alebo dvoma priamočiarymihydraulickými motormi (PHM). Zariadenie vykonáva tri základné pohyby: nakladací pohyb, vykladací pohyb (obr. 2a) a výsypný pohyb (obr. 2b). Pripojenie ramena ku kontajneru je realizované otvoreným hákom na konci ramena a okom na zosilnenom prednom čele kontajnera alebo pomocným rámom pre ISO kontajnery. Dané jednoramenné manipulátory sa ďalej delia podľa typu mechanizmu a podľa nosnosti, obr. 3, tab. 1 [4, 7].
![Tabuľka 1: Delenie jednoramenných manipulátorov [4, 7].](/images/resized/2023/v06/1024x800-fit/fi-tab2.jpg)
Konštrukčný návrh mechanizmu hákového nakladača
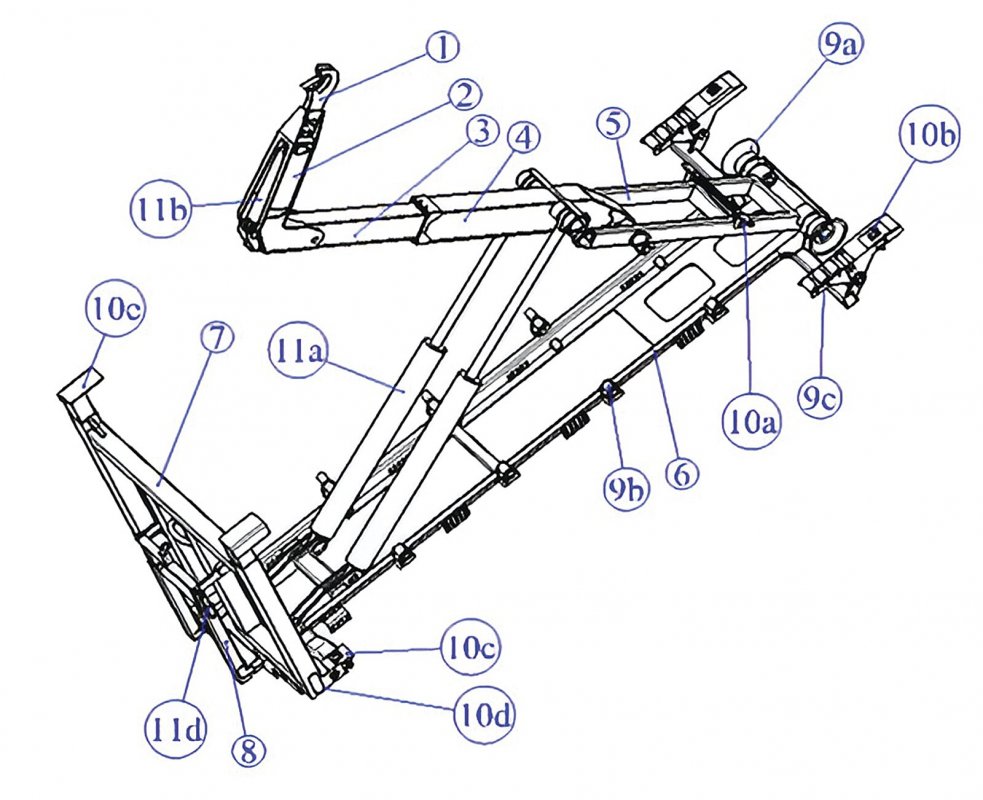
Návrh manipulačného mechanizmujeurčený na prácu s ISO a valivými kontajnermi. S ohľadom na ISO kontajnery a z dôvodu využitia podvozku MAN TGS 8×8, je mechanizmus navrhnutý pre veľkostnú kategóriu kontajneru 1C. Z uvedených vstupných údajov o type zvolenéhoautopodvozku a prepravnej jednotky a podľa rozdelenia jednoramenných manipulátorov (tab. 1) bol pre návrh „hákového nakladača” zvolený tzn. mechanizmus „Z”.Základnékonštrukčnéprvky „HN” (obr. 4) sú: 1) hákový záves, 2) sklopné hákové rameno, 3) vnútorné výsuvné rameno, 4) vonkajšie rameno, 5) pomocný rám, 6) základný rám, 7) pomocný H-rám, 8) nosič H-rámu, 9) navaľovacie prvky: 9a) navaľovacia kladka ABROLL, 9b) pomocný podporný valček, 9c) navaľovacie rameno ISO 1C, 10) poistné a uzamykacie mechanizmy (a, b, c, d, e), 11) pracovná hydraulika:11a) „PHM”pre uskutočnenie základných pohybov, 11b) „PHM” na pohyb sklopného hákového ramena, 11c) „PHM” na pohyb vnútorného výsuvného ramena, 11d) „PHM” na pohyb nosiča H-rámu.
![Obr. 3: Typy mechanizmov hákového nakladača [4, 7].](/images/resized/2023/v06/1024x800-fit/fi-img5.jpg)
V zmysle obr. 4 je zrejmé, že základné pohyby jednoramenného manipulátora zabezpečuje dvojica priamočiarych hydromotorov, poz. 11a. Doplňujúce pohyby indikujúce „Z” mechanizmus, ako posuv vnútorného výsuvného ramena (poz. 3) a naklonenie sklopného hákového ramena (poz. 2) vykonávajú dva ďalšie hydromotory. Hydromotorpre posuv je umiestnený vo vonkajšom a vnútornom výsuvnom ramene a pre naklonenie na poz 11b.Súčasťou hydraulického systému je tiež dvojica „PHM” umiestnených na nosiči H-rámu určených na pohyb pomocného H-rámu a na jeho ukotvenie v hákovom závese. Jednotlivé komponenty sú znázornené napoz. 11d, 8, 7 a 1.
Dimenzovanie a návrh hydraulických komponentov
Jednotlivé hydromotory boli navrhované samostatne najmä podľa momentovej podmienky rovnováhy (MPR)danej kinematickej schémy. Pre tri typy „PHM” bolo použitých päť kinematických schém. Pri návrhu hlavných „PHM” boli potrebné až tri kinematické schémy, teda pre každú pracovnú polohu (nakladanie, vykladanie, vysýpanie) bola použitá samostatná schéma, obr. 5, 6. Realizáciu doplnkových pohybov uskutočňujú dva typy hydromotorov, pre ktoré postačovali dve kinematické schémy, obr. 7. Pri analýze a dimenzovaní sa uvažovalo s maximálnou nosnosťou „HN” 11,8 tony, vyplývajúcej z nosnosti vozidla zníženej o stanovenú hmotnosť samotného manipulačného mechanizmu.
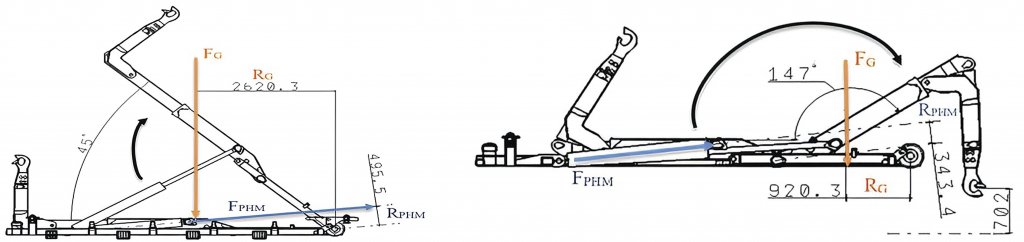
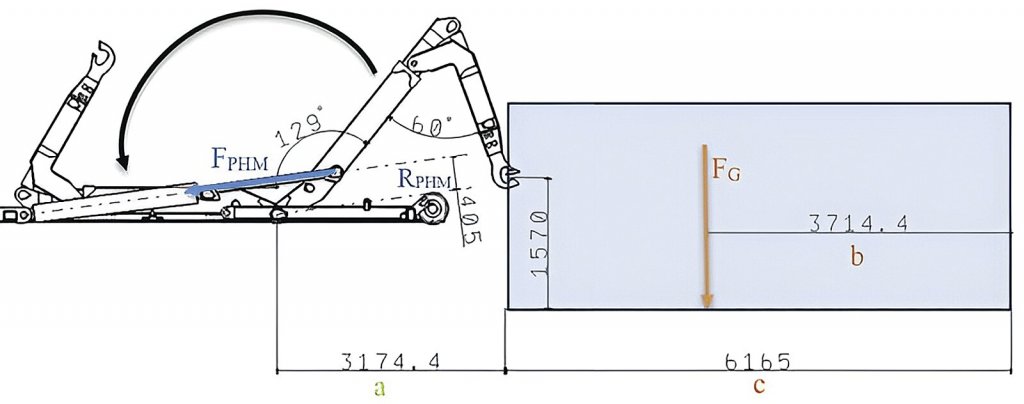
Obrázky 5 a 6 znázorňujú kinematické schémy základných troch pohybov, a ich počiatočné a hraničné polohy spolu s pôsobiskami síl a zaťažení a potrebnými parametrami pre výpočet. Výsledky potrebné pre dimenzovanie „PHM” sú uvedené v tabuľke 2.

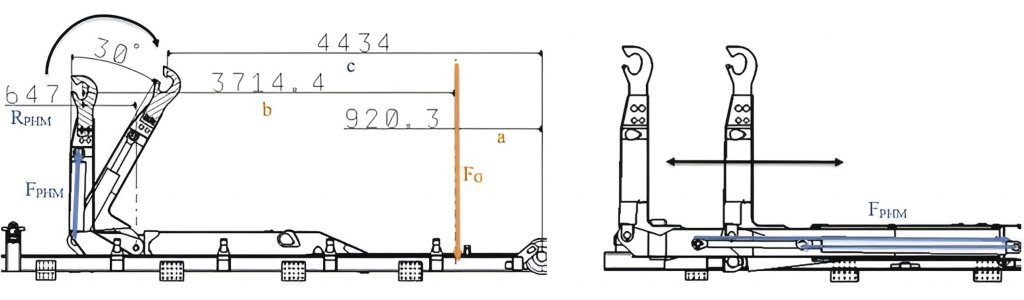
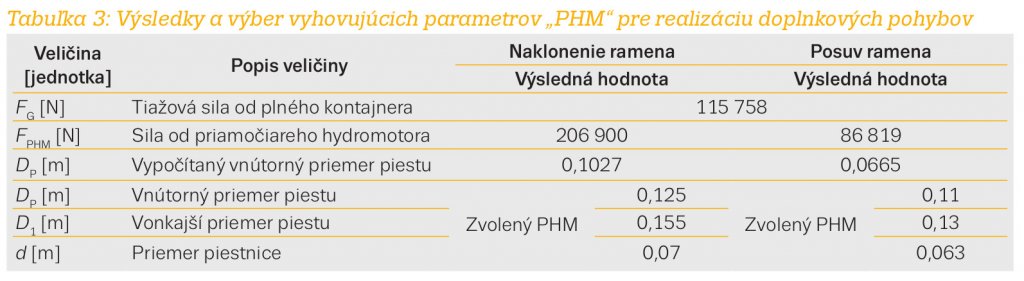
Na obrázku 7 sú znázornené kinematické schémy doplňujúcich pohybov spolu s pôsobiskami síl a parametrami nevyhnutnými k výpočtom. Výsledky návrhu daných schém sú uvedené v tabuľke 3.
Diskusia
V rámci výskumnej a projektovej činnosti bol cieľom práve návrh manipulačného zaradenia, jeho aplikácia v procese kontajnerizácie a implementácia na podvozky 8×8, ktoré sú buď súčasťou vozového parku HaZZ, alebo ich variantami. Aktuálna etapanávrhuhákového nakladača bola ukončená statickými pevnostnými analýzami (MKP) v prostredí Catia V5, s potrebnými konštrukčnými a dizajnovými úpravami, spolu s tvorbou výkresovej dokumentácie. V ďalších etapách výskumu a vývoja bude zámerom rozšírenie využiteľnosti navrhnutého zariadenia, návrh ďalších manipulačných zariadení na rôzne podvozkové platformy a samotné overovania a skúšky prototypov.
Poďakovanie: Výskumná a vývojová činnosť bola realizovaná s podporou projektu APVV-21-0406: Systém mobilných manipulačných zariadení pre logistickú podporu hasičských a záchranárskych zborov.
Literatúra:
[1] Štefko, R., Juraj Rákoš, J., (2008). Logistika a jej význam pre manažment podniku. In: Kotulič, R. (ed.): Zborník vedeckých prác katedry ekonómie a ekonomiky anno 2008: vedecký recenzovaný zborník. 333–371 s.
[2] Kubanova, J., Schmidt, C. (2016). Multimodal and Intermodal Transportation Systems. Communications – ScientificLetters of the University of Zilina, roč. 18, č. 2, s. 104–108.
[3] Jakubec, J., 2011. Studie přepravních jednotek pro kontejnerovou přepravu. Bakalárska práca. VUT v Brně, 2011. 57 s.
[4] Mazurkievič, I., Školník, I., Mináč, P., 2022. Systém mobilných manipulačných zariadení pre logistickú podporu hasičských a záchranárskych zborov. Úvodná štúdia. Tisovec: CSM Industry, s.r.o Tisovec, 2022. 127 s.
[5] Maloch, M., 2017. Návrh a pevnostní analýza hákového nosiče kontejnerových nástaveb mega hook 24. Diplomová práca. Brno: VUT v Brně, 2017. 100 s.
[6] Kadlec, J., 2018. Kontajner na svoz komunálniho odpadu.Diplomová práca. Praha: ČVUT v Praze, 2018. 75 s.
[7] Kucek. A., 2023. Koncepčný návrh manipulátora pre pozdĺžne nakladanie valivých kontajnerov na univerzálnu platformu polyfunkčného vozidla 8×8. Dipl. práca. Slovenská technická univerzita v Bratislave, 2023. 101 s.
[8] Mazurkievič, I., Gulan, L., Izrael, G., Glatz, M., 2015. Mobilné pracovné stroje – Jednoúčelové stroje a zariadenia. Slovenská technická univerzita, 2015.



