


Súčasťou procesu inovácie mobilných pracovných strojov je často z dôvodu zvýšenia ich bezpečnosti, komfortu, alebo dizajnovej tvarovej zmeny potrebné overiť ich parametre [1]. Jednou z takýchto skúšok potrebných na certifikáciu výrobku sú aj normou stanovené podmienky skúšky modulov kabín [2, 3]. Tieto skúšky sú finančne nákladné, pretože je potrebné pre ich realizáciu vyhotoviť potrebný počet funkčných vzorov kabín a tieto podrobiť deformačným skúškam. V prípade negatívnych výsledkov je potrebné navrhnúť opatrenia a skúšky opakovať na nových funkčných vzoroch, čo predstavuje nemalé finančné náklady a často aj časový sklz pri návrhu a realizácii nového, alebo inovovaného mobilného pracovného stroja.
Z dôvodu optimalizácie procesu návrhu preto hľadáme nové možnosti a metódy pomocou ktorých môžeme predmetné skúšky simulovať a postupne sa takto priblížiť ku konečnému finálnemu riešeniu [4, 5]. Tieto činnosti možno realizovať za pomoci CAD softvérov a výpočtových programov, napríklad metódou konečných prvkov [6].
Ochranné konštrukcie chrániace pri prevrátení typu ROPS zahŕňajú všetky prvky, ktoré sú trvalou súčasťou rámu kabíny, nepatria sem demontovateľné časti, ako napríklad dvere kabíny alebo okenná konštrukcia či sklá.
Norma presne špecifikuje pre rôzne typy strojov, ako sa má daná ochranná konštrukcia podrobiť skúške, ako sú definované pomocné testovacie zariadenia, ako napríklad konštrukcia pre rozloženie zaťažovacieho napätia alebo zariadenia a vybavenie potrebné na priebeh danej skúšky, či vyhodnotenie a jednotlivé posúdenie vykonanej skúšky na skúšobnej vzorke. Zaťaženia potrebné pre bezpečnostnú skúšku sú stanovené normou, v závislosti od kategórie, využitia a hmotnosti stroja [2, 3].
Ochranné konštrukcie chrániace pred padajúcimi predmetmi FOPS poskytujú dve kategórie prijateľnosti prihliadajúc na využiteľnosť špecifického mobilného pracovného stroja.
Kategória I., sa vzťahuje na ochranu vodiča pred padajúcimi tehlami, betónovými kockami, ručnými nástrojmi, náradie používané pri údržbe cestných komunikácií, nástroje na úpravu okolia a iné obslužné činnosti na pracovnom stanovisku. Predpokladá sa, že ochrana pred vniknutím vyššie uvedených predmetov bude zaistená pre kategóriu I. pri páde okrúhleho predmetu z výšky dostatočnej na vyvinutie energie 1365 J. Guľový predmet je z dostatočne pevnej ocele, alebo tvárnej liatiny, s hmotnosťou 45 kg a priemerom nepresahujúcim 250 mm. Ďalej norma striktne predpisuje postup samotnej deštruktívnej skúšky, ako aj umiestnenie DLV priestoru (Deflection Limiting Volume) [7] pod skúšanú ochrannú konštrukciu, ako aj presnú polohu umiestnenia padajúceho predmetu pre danú kategóriu stroja.
Kategória II., zabezpečuje ochranu vodiča pred ťažkými predmetmi, príkladom sú stromy alebo kamene. Pri skúškach podľa II. kategórie sa používa voliteľný predmet (guľovitý, alebo valcovitý) s max. priemerom 400 mm, ktorý je schopný vyvinúť pri dopade energiu 11 600 J. Jeho dopadová plocha musí byť kruhová s priemerom 200 mm, rovinná.
Overovanie bezpečnosti kabíny simuláciou
Proces overovania odolnosti kabíny šmykom riadeného nakladača Locust 904 simuláciou vzhľadom na bezpečnostné požiadavky predpisov FOPS a ROPS je možné rozdeliť do dvoch krokov. Prvý krok spočíva v príprave 3D dát dodaných od výrobcu kabíny, v druhom kroku sa realizuje pevnostný výpočet metódou konečných prvkov.
Príprava 3D dát od výrobcu kabíny zahŕňa úpravu modulárnej konštrukcie tak, aby bol zachovaný tvar a vlastnosti konštrukcie, ale s účelom zjednodušenia a vytvorenia spojitých plôch v miestach určených pre technologické úkony – napr. zvary. Keďže konštrukcia kabíny mobilného pracovného stroja pozostáva zo špeciálnych „motýlikových” profilov a plechov s konštantným prierezom a hrúbkou, dá sa pôvodný objemový model zjednodušiť na plošný model kabíny. Počas tejto úpravy je potrebné z objemových častí kabíny – profily a plechy určitej hrúbky vytvoriť strednicové plochy pôvodných profilov. V záujme bezproblémovej tvorby siete, avšak so snahou zachovať tuhosť pôvodného modelu je taktiež dôležitým krokom odstránenie malých zaoblení na kabínových profiloch, obr 1, 2.
Pripravený plošný model kabíny je použitý ako vstup do výpočtovej simulácie, kde je potrebné zadať aj okrajové podmienky a zaťaženia stanovené normou pre bezpečnostné skúšky kabín.
Simulácia bezpečnostnej skúšky bola realizovaná vo výpočtovom softvéri Ansys, kde bol vytvorený matematický model. Na tvorbu matematického modelu boli použité tzv. škrupinové (shell) lineárne prvky. Výnimkou boli úchyty kabíny k rámu, diskretizované lineárnymi objemovými prvkami (solid).
Pri generovaní siete bol na všetky kabínové profily, bočné a zadné plechy použitý plošný štvoruzlový prvok. Na objemové úchyty kabíny k rámu bol generovaný objemový desaťuzlový prvok, obr. 3.

Okrajové podmienky výpočtu
Konštrukcia kabíny bola votknutá (odobratie všetkých stupňov voľnosti) na plochách, ktoré sú počas skúšky v kontakte s pevným rámom. Počas skúšky je kabína uchytená k rámu rovnakým spôsobom ako počas prevádzky k rámovej konštrukcii šmykom riadeného nakladača. V tejto súvislosti je nutné spomenúť použitie „silentblokov” v miestach uchytenia kabíny k rámu pracovného stroja. Toto upevnenie bolo počas matematického výpočtu uvažované.
Zaťaženie
V prípade aplikácie bočného zaťaženia bola vymodelovaná plocha predstavujúca dosku zaťažujúceho lisu počas reálnej skúšky. Táto doska bola zaťažená silou potrebnou na dosiahnutie deformačnej energie predpísanej normou pre šmykom riadené nakladače danej hmotnostnej kategórie. Po dosiahnutí tejto energie bola doska postupne odľahčovaná až do nulového zaťaženia. V prípade zvislého zaťaženia bola použitá kabína deformovaná v predchádzajúcom kroku, zaťažená zvislo na plochách, ktoré sú v kontakte so zaťažujúcou doskou skúšobného lisu.
Porovnanie výsledkov simulácie a skúšky
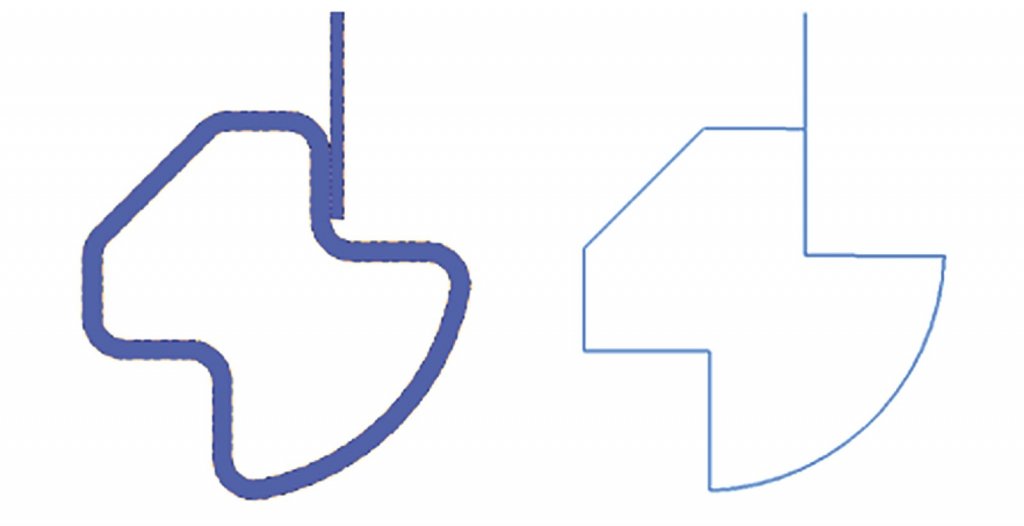
Na základe matematickej simulácie bezpečnostnej skúšky a výsledkov experimentálneho zaťažovania prototypu kabíny je možné vyvodiť niekoľko záverov. Dôležité je spomenúť fakt, že kabína podrobená matematickému výpočtu bola uchytená pevnými väzbami v miestach uchytenia k rámu pracovného stroja. Pri reálnych skúškach bola kabína uchytená k rámu stroja pomocou pružných/elastických členov (silentblokov), tak ako aj počas jeho pracovnej prevádzky. Súčasťou experimentálnej bezpečnostnej skúšky kabíny je okrem rámu nakladača aj pracovné zariadenie, obr. 4, 5.

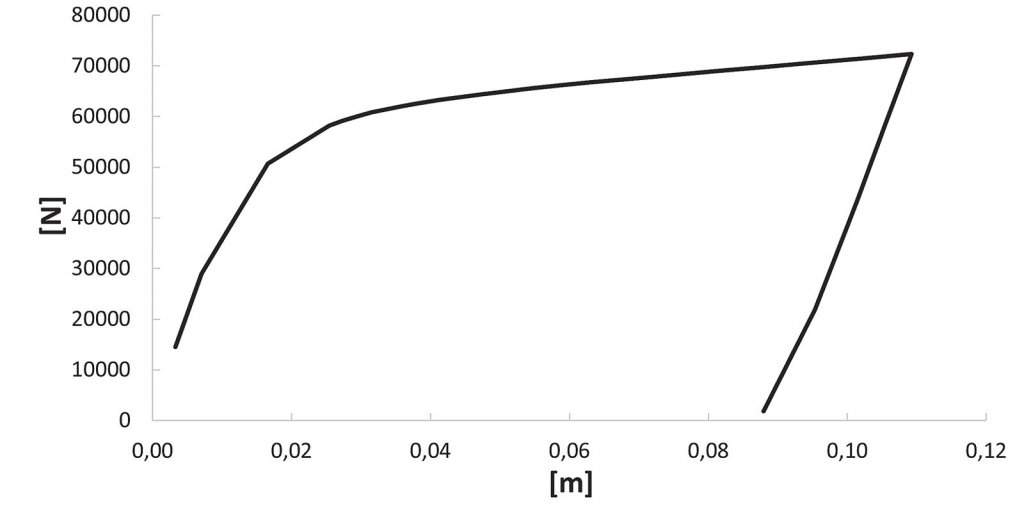
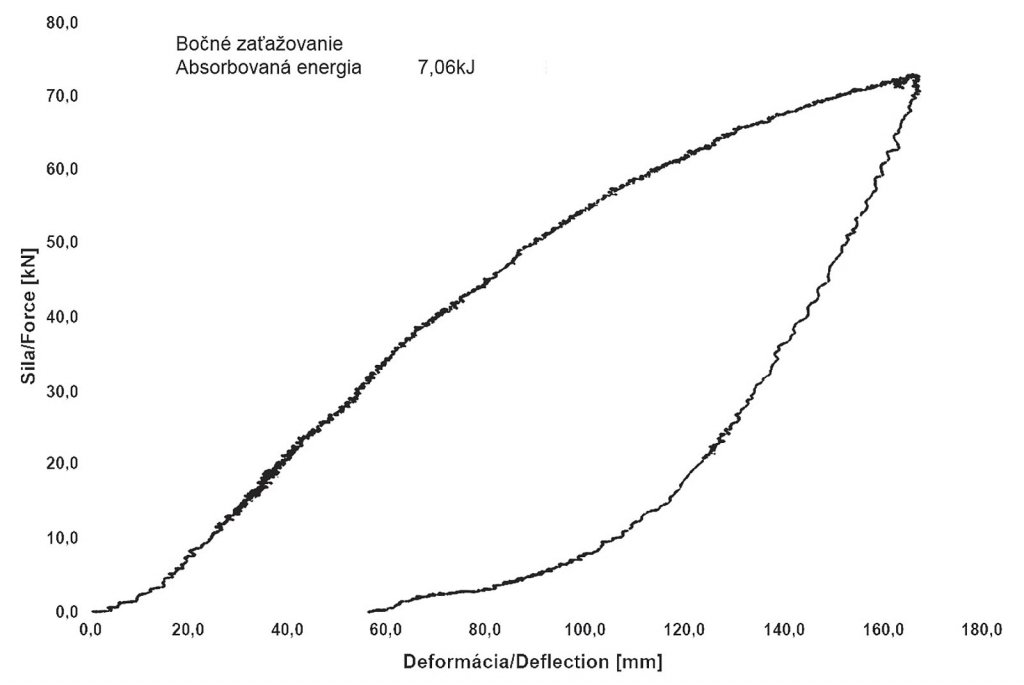
Ako porovnateľné výstupy je možné použiť výsledné grafy závislosti deformácie konštrukcie kabíny od bočnej zaťažovacej sily. V prípade matematického výpočtu je graf vygenerovaný z výpočtového softvéru, pri experimentálnej skúške sú hodnoty sily a deformácie zaznamenávané počas zaťažovania, obr. 6, 7.
Z uvedenej závislosti deformácie konštrukcie kabíny vzhľadom na zvyšovanie bočnej sily z výpočtovej simulácie je maximálna deformácia kabíny pri simulácii približne 110 mm, z grafu nameraných hodnôt je maximálna deformácia kabíny približne 160 mm. Po vyhodnotení spomaleného videa z reálnej zaťažovacej skúšky bolo možné usúdiť, že vyššia hodnota deformácie môže vznikať v dôsledku uchytenia kabíny k rámu pracovného stroja prostredníctvom pružných členov.
Matematickou simuláciou boli overené aj ďalšie skúšobné zaťaženia predpísané normou pre ochranné konštrukcie chrániace pri prevrátení typu ROPS – aj zvislé a pozdĺžne zaťaženie. Taktiež aj ochranné konštrukcie chrániace pred padajúcimi predmetmi FOPS kategórie 1., kde bol výpočet zrealizovaný ako dynamická analýza padajúceho guľového telesa, prostredníctvom explicitnej časovej integrácie. Z dôvodu vysokej časovej náročnosti výpočtu bol sledovaný len prvý náraz guľového telesa, ďalšie odrazy sa už nesimulovali.
Na základe porovnania výsledkov zaťažovania kabíny mobilného pracovného stroja, či už matematickou simuláciou, alebo reálnou zaťažovacou skúškou sa dá usúdiť, že vhodne zvolenými výpočtovými parametrami a okrajovými podmienkami je možné s vysokou vierohodnosťou overovať bezpečnosť kabín mobilných pracovných strojov vzhľadom na platné predpisy a normy aj matematickým výpočtom – simuláciou. Takáto prediktívna metóda značne zjednoduší a urýchli návrh inovatívnych modulov mobilných pracovných strojov už počas konštrukčnej fázy, a umožňuje prispôsobiť zmeny konštrukcie včas, ešte pred výrobnou fázou prototypu. Dosiahne sa zníženie časovej náročnosti na vývoj, výrobu a skúšanie modulu pracovného stroja. Zredukujú sa aj finančné náklady vzhľadom na to, že sú simuláciou skúšané 3D dáta, a nie je nutné reálnej skúške podrobiť niekoľko kusov vyrobených kabín.
Táto práca bola podporovaná Agentúrou na podporu výskumu a vývoja na základe Zmluvy č. APVV-15-0524 a Zmluvy č. APVV-17-0309.
Literárne zdroje:
- [1] Mazurkievič I., Gulan L., Izrael G.: Mobilné pracovné stroje – Teória a konštrukcia základných modulov, Vydavateľstvo STU v Bratislave, ISBN 978-80-227-3968-9, 2013
- [2] STN EN ISO 3449, Stroje na zemné práce. Ochranné konštrukcie proti padajúcim predmetom. Laboratórne skúšky a technické požiadavky
- [3] STN EN ISO 3471, Stroje na zemné práce. Ochranné konštrukcie chrániace pri prevrátení. Laboratórne skúšky a technické požiadavky
- [4] Mazurkievič I., Gulan L., Izrael G.: Mobilné pracovné stroje - Cestné stroje, Vydavateľstvo STU v Bratislave, ISBN 978-80-227-3653-4, 2012
- [5] Mazurkievič I., Gulan L., Izrael G.: Mobilné pracovné stroje - Zemné stroje, Vydavateľstvo STU v Bratislave, ISBN 978-80-227-4190-3, 2014
- [6] D. Hailoua Blanco, C. Martin, A. Ortalda.: Virtual ROPS and FOPS Testing on Agricultural Tractors According to OECD Standard Code 4 and 10, In: 14th International LS-DYNA Users Conference, 2016
- [7] STN EN ISO 3164, Stroje na zemné práce. Laboratórne hodnotenie ochranných konštrukcií. Chránený priestor limitujúci deformácie



