
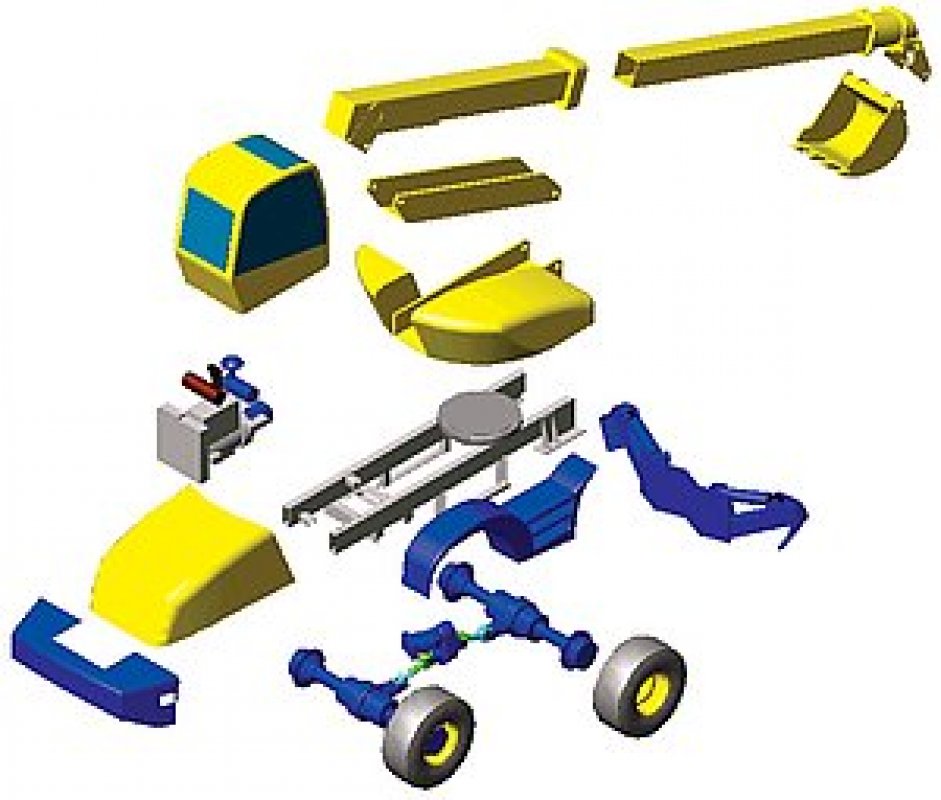
Pri vývoji nových konštrukcií mobilných pracovných strojov sa dnes uplatňujú najnovšie technické poznatky. V konštrukčnej praxi sa dostávajú do popredia najmä flexibilné zostavy strojov zložené z unifikovaných modulárnych stavebných dielcov. Modulárne riešenie konštrukcie využíva stavebné dielce koncipované na báze úplných funkčných jednotiek. Tieto umožňujú zostavovanie rôznorodých konštrukcií so zodpovedajúcimi, vopred definovanými technickými parametrami, požadovanou kvalitou a bezpečnosťou, obr. 1.

Obr.1 Modulárna štruktúra mobilného pracovného stroja-teleskopického manipulátora
Súčasný sortiment mobilných pracovných strojov sa vyznačuje širokou druhovou, typovou a veľkostnou skladbou. V ostatnom období sa u popredných firiem zaoberajúcich sa vývojom mobilných pracovných strojov objavili nové koncepcie univerzálnych strojov, označované ako teleskopické manipulátory. Túto skupinu možno charakterizovať ako univerzálne mobilné pracovné stroje určené na manipuláciu s rôznymi druhmi materiálov, pričom využívajú široký sortiment prídavných pracovných zariadení.
Kabínu možno označiť ako základný stavebný modul mobilných pracovných strojov, plniaci rôzne funkcie z hľadiska bezpečnosti obsluhy a jej ochrany pred nepriaznivými vplyvmi počasia a pracovného prostredia. Konštrukcia kabín prešla spolu s ostatnými základnými stavebnými modulmi stroja za niekoľko desaťročí evolučným vývojom, obr. 2. Súčasný trend vo vývoji kabín mobilných pracovných strojov smeruje nielen k zvyšovaniu komfortu obsluhy a teda aj produktivity práce, ale aj k zvyšovaniu jej bezpečnosti.
Niektoré možnosti zvyšovania aktívnej bezpečnosti obsluhy mobilných pracovných strojov možno zhrnúť do nasledovných bodov:
- využitie nových materiálov v interiéroch a v konštrukcii mobilných strojov
- uplatňovanie získaných skúseností z havarijných prípadov
- využitie nových riadiacich a kontrolných systémov
- používanie progresívnejších konštrukčných riešení
- dodržiavanie platných technických noriem a predpisov v procese efektívneho návrhu modulov kabín
- využitie výpočtovej techniky v procese návrhu konštrukcie modulu kabíny.

Obr.2 Vývoj kabin mobilných pracovných strojov
Postupným vývojom mobilných pracovných strojov sa vyvinuli aj tvary kabín špecifické pre jednotlivé typy strojov. Základný tvar skeletu kabíny je podmienený funkciou stroja. Zohľadňuje teda predovšetkým druh a funkciu pracovného zariadenia realizujúceho určitú pracovnú technológiu a výhľadové zóny potrebné na bezpečné vedenie a kontrolu pracovného zariadenia, resp. pracovného nástroja, obr. 3. Stroje, ktoré majú podobné pracovné zariadenia, majú vo všeobecnosti aj podobný tvar kabíny.
Návrh modulu kabín pomocou interaktívneho systému
Interaktívny systém návrhu kabín mobilných strojov umožňuje konštruktérovi verifikovať jednotlivé body návrhu tvaru kostry modulu kabíny a priebežne – interaktívne - zadávať vstupné údaje a súčasne kontrolovať navrhnutý tvar, obr. 4. Systém zabezpečuje dodržanie príslušných noriem zabezpečujúcich minimálne rozmery pracovného priestoru a výhľad z miesta vodiča. Pomocou softwarových produktov využívajúcich metódu konečných prvkov umožňuje kontrolu odolnosti kabíny proti padajúcim predmetom a proti prevráteniu. V prípade, že rám kabíny nevyhovuje niektorým požiadavkám, systém umožní opravu návrhu a proces kontroly je možné opakovať.
Po správnom návrhu tvaru kabíny, definovaní prierezov a kontrole zorného poľa operátora je možné vytvoriť 3-rozmerný model potrebný pre ďalšie výpočty. Pre skúšky ROPS a FOPS nie je prípustné, aby deformovaná konštrukcia zasahovala do chráneného priestoru obsluhy. Kontrola splnenia tejto podmienky sa realizuje v programe COSMOS/M a spočíva vo vizuálnej kontrole deformácie rámu z rôznych pohľadov pri spustenej animácii. Pre kontrolu dosiahnutej deformačnej energie pri bočnom zaťažení skúšky ROPS a pri skúške FOPS sa z programu COSMOS/M vygenerujú grafy závislosti „sila - deformácia", prípadne je tieto údaje možno získať z výstupných súborov a tiež sa vykoná výpočet deformačnej energie.

Obr.4 Pohlad na uživatelské protredie programu
Záver
Interaktívny systém je účinná pomôcka pre konštruktéra využiteľná pri dôslednom návrhu modulu kabín mobilných pracovných strojov. Software umožňuje predbežnú verifikáciu návrhu kabíny pred normami stanovenými deštrukčnými skúškami. Tento postup výrazne prispieva k zníženiu nákladov vyvolaných prípadnými neúspešnými výsledkami skúšok odolnosti konštrukcie modulu kabíny. Je nutné však upozorniť, že analýzy vykonané s využitím akéhokoľvek systému nenahrádzajú požadované laboratórne skúšky. Tieto treba v praxi vykonať v procese skúšok a certifikácie konkrétneho druhu mobilného pracovného stroja.

Obr.3 Charakteristické tvary skeletu kabí mobilných pracovných strojov



