

Vozík bude mať možnosť rôznych vyhotovení vzhľadom na požiadavky na prejazdnosť a pohodlie. Táto konštrukcia bude postupne vyvíjaná a testovaná pre rôzne miesta a činnosti.
Koncepčné riešenie vozíka
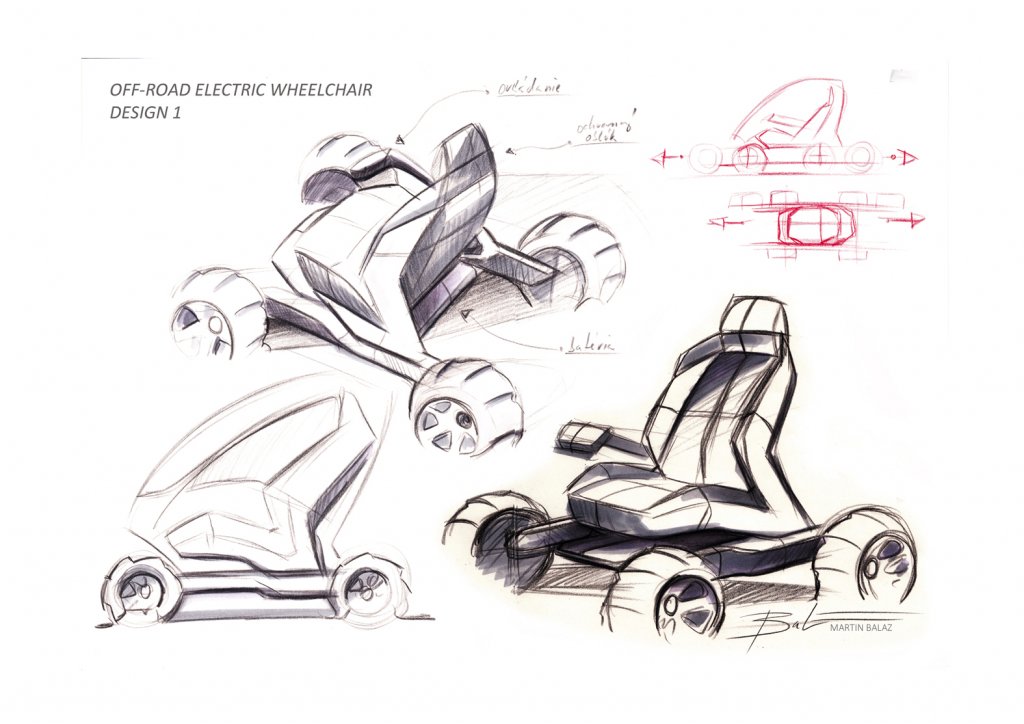
Ako základ pre konštrukciu bol dizajnérsky návrh (obr. 1) Mgr. art. Martina Baláža, ArtD. z Fakulty architektúry STU v Bratislave. Od tohto návrhu sa odvíja konštrukčné riešenie, ktoré zohľadňuje aj mechanickú konštrukciu a vlastnosti invalidného vozíka.
Okrem dizajnového návrhu je potrebné spĺňať aj rôzne požiadavky na konštrukciu vozíka. Jednou z hlavných požiadaviek je jednoduchosť a variabilita konštrukcie. Vďaka týmto vlastnostiam je možné dosiahnuť nižšie výrobné náklady vzhľadom na dnes vyrábané vozíky pre hendikepované osoby. Samozrejmosťou je dodržanie bezpečnostných a ergonomických predpisov. Ďalším faktorom ovplyvňujúcim použitie vozíka je komfort prevádzky, ktorý samozrejme nesmie ovplyvniť jazdné vlastnosti. Je potrebné dodržať dostačujúcu prejazdnosť terénom a taktiež prejazdnosť prekážok v mestskom prostredí ako sú obrubníky a schody. Dôležité je pri všetkých spomínaných vlastnostiach dodržať aj kompaktné rozmery, aby bolo možné prejsť cez klasický rozmer dverí, resp. výťahu.
Konštrukcia vozíka
Celková konštrukcia vozíka sa bude skladať z troch hlavných častí. Tieto časti budú vzájomne prepojené tak, aby bolo možné rôzne druhy týchto častí vzájomne jednoducho kombinovať. Koncepcie vozíka sú špecifikované vzhľadom na požiadavky hendikepovaného. Sú možnosti manuálneho aj elektrického pohonu a taktiež rôzne druhy kolies.
Inovatívnosť konštrukcie spočíva vo vytvorení vozíka z viacerých modulov. Táto modularita je jednou z hlavných výhod vytváranej konštrukcie. Pomocou modularity je možné minimalizovať celkové náklady, materiálové ale taktiež finančné. Ďalšou výhodou modulárnej konštrukcieje jej flexibilita a jednoduchá aktualizácia, vylepšenie alebo modernizácia jednotlivých modulov, napr. aktualizácia na pohon 4×4, doplnenie batérie pre zvýšenie dojazdu, doplnenie pásov pre ťažký terén, prípadne iné požiadavky. Na základe flexibility je možné jednoducho vytvoriť vozík, ktorý bude iba manuálne poháňaný a bude minimalizovaná výrobná a taktiež predajná cena. Tento typ vozíka bude použiteľný pre hendikepované osoby v povojnových oblastiach a oblastiach s menej alebo vôbec nerozvinutou infraštruktúrou, kde je potrebná nižšia obstarávania cena a taktiež veľmi dobrá prejazdnosť terénom. Na rozdiel od lacnej verzie s manuálnym pohonom je možné pomocou zmeny niektorých modulov vytvoriť vozík do extrémne ťažkých podmienok s elektrickým pohonom všetkých kolies. Tento vozík by bol primárne určený pre hendikepovaných, ktorý by ho mali záujem využívať hlavne na rekreačné účely. Táto konštrukcia sa dá následne pomocou pridania jedného modulu upraviť na pásový pohon, čím sa zvýši dostupnosť aj na sypkých, resp. zasnežených povrchoch.
Manuálne poháňaný vozík
Ako bolo už spomenuté, tento typ vozíka je vytváraný ako najlacnejší variant (obr. 2). Prvou zo základných stavebných častí vozíka je podvozok. Ten je z väčšej časti pri všetkých typoch vozíka rovnaký a vďaka tomu je možné vytvárať rôzne kombinácie modulov. Hlavnou časťou je rám, ktorý slúži na uchytenie častí náprav a sedačky a taktiež na umiestnenie pohonných mechanizmov. Ďalším prvkom je samotná náprava vyhotovená ako výkyvná, jej ramená sú k rámu na každej strane vozíka upevnené pomocou centrálneho čapu, vďaka čomu sa predné a zadné ramená otáčajú okolo jednej a tej istej osi. V strede ramena je náprava odpružená dvojicou pružina-tlmič. Náboj kolesa je umiestnený na opačnom konci ramena a jeho komponenty sú závislé od typu pohonu. Pri manuálne poháňanom vozíku sa bude na náboji hnanej zadnej nápravy nachádzať reťazové koleso. Posledným prvkom podvozku je koleso, ktoré môže byť rôznych konštrukcií zohľadňujúcich samotné využitie vozíka. Typ vozíka s manuálnym pohonom bude mať osadené malé terénne kolesá.

Ďalšou stavebnou časťou je pohonná jednotka, ktorá je navrhnutá v dvoch variantoch, t.j. ako manuálny alebo elektrický pohon. Manuálny pohon je zabezpečený pomocou práce svalov, ktorá je prenášaná prostredníctvom pákového mechanizmu cez reťazový prevod na hnacie kolesá. Dôležitou časťou manuálneho hnacieho mechanizmu je jeho optimalizácia s dôrazom na minimalizáciu ergonomických síl pri maximalizácii hnacej sily. Pre navrhnutie správneho prevodu je dôležité dodržať určitú minimálnu rýchlosť pohybu vozíka s dôrazom na jeho manévrovateľnosť v náročných a stiesnených podmienkach.
Sedadlo a súvisiace komponenty sú poslednou, ale pomerne najdôležitejšou časťou invalidného vozíka. Ergonómia sedadla musí byť navrhnutá tak, aby umožňovala hendikepovanému bezpečný a komfortný pohyb v teréne (alebo po predpokladanom podloží ...). Dôležitý je nielen tvar sedadla, ale aj použité materiály, aby vibrácie spôsobené pohybom boli pohltené a aby nepôsobili veľké tlaky na vnútornú kostru hendikepovaného. Ďalšou časťou je podložka pre nohy. V rámci prototypu vozíka bude navrhnutá aj bezpečnostná kabína chrániaca jazdca pri prevrátení, resp. poveternostnými vplyvmi. Na zvýšenie bezpečnosti pri prejazde schodiskom bude sedadlo naklápané tak, aby bola neustále udržovaná vodorovná poloha.
Vozík s elektrickým pohonom
Na rozdiel od manuálne poháňaného vozíka bude mať elektricky poháňaný vozík vyššiu obstarávaciu cenu, vzhľadom na potrebu použiť drahé súčiastky ako elektromotory, batérie a ich ovládanie. Tento pohon umožňuje aj rôzne konštrukcie podvozkovej časti vzhľadom na uloženie elektromotora. Ak by bol elektromotor uložený centrálne, tak by na podvozkovej časti bolo potrebné upevniť reťazové kolesá. Konštrukčne jednoduchším a taktiež výhodnejším variantom je použitie elektromotorov v kolesách. Toto riešenie vyžaduje špecifický elektromotor s vhodnými parametrami ako napr. nižšie otáčky s dostatočným krútiacim momentom na pokrytie jazdných odporov. Z podstaty riadenia vozíka je dôležité použitie vždy dvojice elektromotorov, t.j. musí byť poháňaná jedna strana vozíka nezávisle na druhej, keďže sa jedná o šmykom riadený invalidný vozík. Hlavným prvkom pohonnej jednotky je výkonová riadiaca elektronika, ktorá vyhodnocuje jazdu a riadi pohon vozíka tak, aby dosiahol dostatočné jazdné výkony v závislosti od terénu a jazdných odporov. Zdrojom energie je LiFePO4 akumulátor umiestnený v ráme vozíka. Pričom prúdové špičky je možné vykryť pomocou superkondenzátorov. Riadenie rýchlosti a smeru je možné buď pomocou pák manuálneho pohonu (v prípade motora v strede medzi nápravami), kde sú smer a veľkosť rýchlosti kolesa na stranu určené polohou páky. Ťahaním k sebe sa bude koleso otáčať smerom dozadu alebo naopak zatlačením od seba smerom dopredu. Ďalšou možnosťou je ovládanie pomocou ergonomického pákového ovládača, avšak to je využiteľné len pri plne elektrickom vyhotovení. V prípade plne elektrického invalidného vozíka (obr. 3) je hendikepovanému umožnené ovládanie pomocou pákového ovládača použitím jednej ruky, ktorý je umiestnený na konci opierky ruky. Túto opierku je možné optimálne nastaviť individuálne podľa potreby.

Najterénnejším riešením je kombinácia elektrického vozíka s pásovým podvozkom (obr. 4). Pásový podvozok je možné jednoducho pomocou OTT ”Over thetiretrack” vytvoriť z klasického elektrického vozíka s malými terénnymi kolesami. Jedinou zmenou v konštrukcií podvozku je potreba poistenia zadného a predného ramena voči vzájomnému pohybu.
V súčasnosti prebieha realizácia prototypu plne elektrického invalidného vozíka určeného do stredne ťažkého až ťažkého terénu, ktorý bude poháňaný štyrmi elektromotormi v kolesách. Na vytvorenom prototype bude overená nosná konštrukcia a taktiež jej vlastnosti, aby bolo následne možné optimalizovať konštrukciu, poprípade vytvárať nové moduly, ktoré by boli následne testované.

Literatúra:
[1] MAZURKIEVIČ I., GULAN L. a IZRAEL G., Mobilné pracovné stroje: teória a konštrukcia základných modulov. 1. vyd. Bratislava: Slovenská technická univerzita v Bratislave, 2013. 301 s. ISBN 9788022739689
[2] ISO 7176-1:2014, Determination of static stability, 2014.
[3] ISO 7176-2:2001, Determination of dynamic stability of electricwheelchairs, 2009.
[4] ISO 7176-5:2008, Determination of dimensions, mass and manoeuvringspace, 2012.
[5] ISO 7176-7:1998, Measurement of seating and wheeldimensions, 2013.
[6] ISO 7176-28:2012, Requirements and test methodsforstair-climbingdevices, 2012.



