


Na zvýšenie účinnosti je výhodné využiť i akumulátor energie, ktorý umožňuje takto získanú energiu dočasne uložiť a využiť ju vo vhodnom čase. Kvôli minimalizácii mechanických strát pri prenose energie sa s úspechom využívajú elektrické pohony, ktoré v syntéze so spaľovacím motorom, ako zdrojom energie, tvoria hybridný pohonný systém rýpadla, nie všetky koncepcie hybridných rýpadiel však obsahujú elektrické pohony. Hybridné rýpadlá sú tak schopné pracovať účinnejšie, s nižšími emisiami a prevádzkovými nákladmi, pričom úspora paliva oproti štandardným rýpadlám je asi 25 %. Výhodou tiež môže byť nižšia hlučnosť týchto strojov. Ďalším dôležitým momentom pri návrhu hybridného pohonu je určiť zdroj rekuperácie energie. Z výpočtov a experimentov je možné za najvýdatnejší zdroj rekuperovateľnej energie považovať rotačný pohyb otočnej nadstavby. Väčšina hybridných rýpadiel na trhu rekuperuje práve energiu otočnej nadstavby.
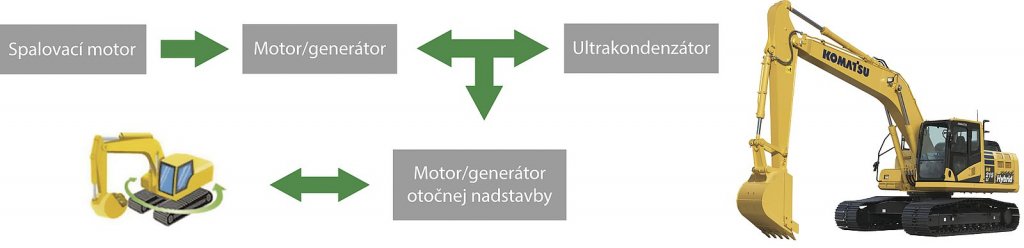
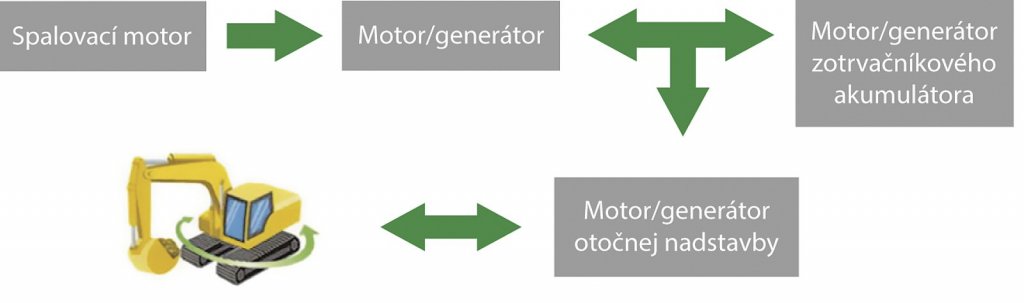
Analyzovaný pohon nadstavby pracuje na podobnom princípe ako napríklad pohon rýpadla Komatsu HB215LC-2. Toto hybridné rýpadlo mení mechanickú energiu (na obrázku sivou farbou) spaľovacieho motora na elektrickú (na obrázku zelenou farbou), a tou poháňa elektrický motor nadstavby, pričom voľná energia je uložená v ultrakondenzátore. Analyzovaný systém sa však líši v akumulátore. Miesto ultrakondenzátora využíva zotrvačník s integrovaným elektrickým motor-generátorom, ktorý v čase prebytku energie pracuje v motorickom režime, zvyšuje otáčky zotrvačníka a odoberá energiu zo systému a v čase nedostatku energie pracuje v generatorickom režime, znižuje otáčky zotrvačníka a dodáva elektrickú energiu do systému.
Zotrvačníkový akumulátor využíva z dôvodu minimalizácie pasívnych odporov magnetické ložiská a je predmetom experimentálneho výskumu na Strojníckej fakulte STU v Bratislave. Výhodami zotrvačníkového akumulátora sú vysoký špecifický výkon a vysoká špecifická energia pri vysokej životnosti akumulátora.
Z hľadiska návrhu hybridného pohonu je nutné analyzovať pracovný cyklus rýpadla z hľadiska mechaniky, teda na prácu, rekuperáciu a akumuláciu energie je potrebné nazerať ako na fyzikálne deje popísané diferenciálnymi rovnicami. Kinetická energia rotujúceho telesa, či už ide o zotrvačník alebo nadstavbu, je rovná:
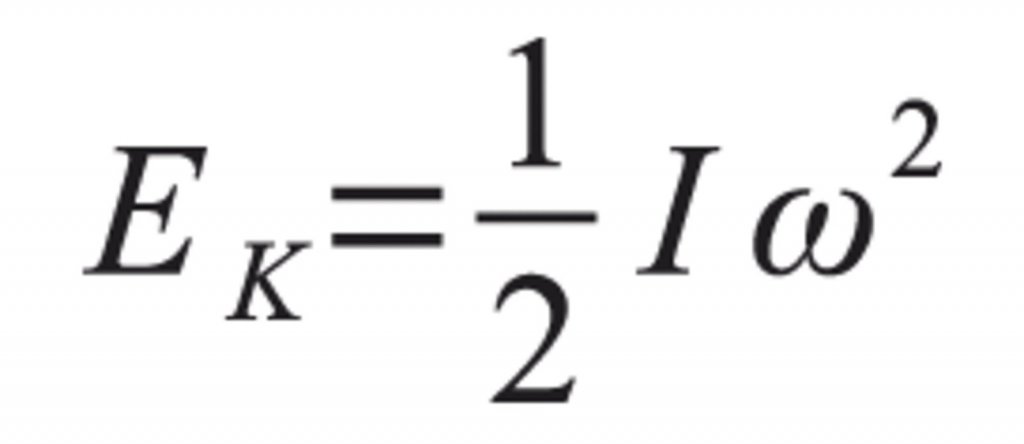
kde Ek je kinetická energia rotácie telesa [J], I je moment zotrvačnosti rotujúceho telesa [kg.m2] a ω je uhlová rýchlosť rotácie telesa [rad/s],. Proces rekuperácie energie nastáva pri brzdení rotácie nadstavby, teda kinetická energia rotácie sa mení v čase a poháňa motor v generátorovom režime výkonom:
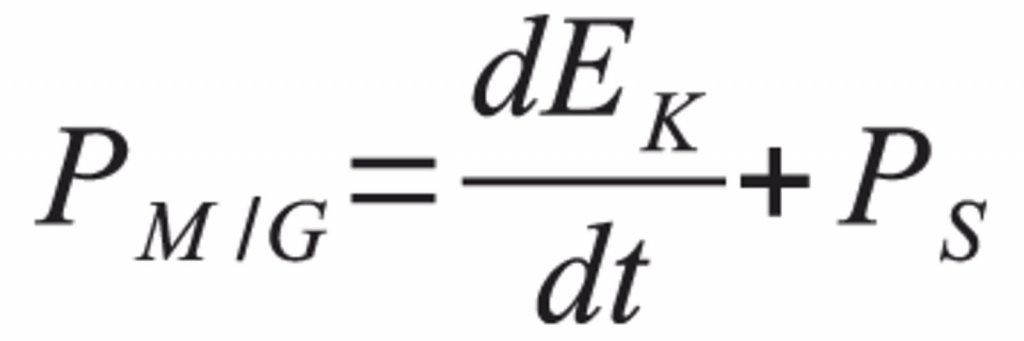
kde PM/G je mechanický výkon motora, resp. generátora [W], dEK je diferenciál kinetickej energie [J], dt je diferenciál času [s] a PS je stratový výkon [W], predovšetkým vo forme tepelného výkonu, pričom analyzovaný model pohonu uvažuje trenie. Elektrický výkon jednosmerného motora, resp. generátora je podstatnou súčasťou výpočtového modelu. Matematický model pohonu uvažuje nasledovný vzťah medzi elektrickým a mechanickým výkonom jednosmerného motora, resp. generátora:
kde PE je elektrický príkon motora, resp. výkon generátora [W], ω je jeho uhlová rýchlosť [rad/s], T je krútiaci moment [N.m] a k je stratový súčiniteľ [1/N.m.s]. Pri prenose a transformácii elektrickej energie v rámci pohonného systému však tiež dochádza k stratám energie, ktoré sú vyjadrené elektrickou účinnosťou:
kde: PM je elektrický príkon motora [W], ηE je elektrická účinnosť prenosu elektrickej energie [–] a PG je elektrický výkon generátora [W]. Tento vzťah ilustruje priamy tok energie z generátora do motora, avšak ako je zrejmé z obr. 2, tok energie hybridného rýpadla sa môže vetviť, resp. jednotlivé toky energie sa môžu spájať. Správanie sa tokov energie počas pracovného cyklu hybridného pohonu popisuje jeho stratégia. Na modelovanie pohonného systému je využitý softvérový nástroj „Simulink”, pričom jeho stratégia bola simulovaná v module „Stateflow”, ktorý umožňuje simulovať systém s konečným počtom stavov, tzv. „finite state machine”. Z hľadiska pohonu nadstavby má podľa tejto metodiky analyzovaný model tri pracovné stavy:
- Voľnobeh – Energia z generátora spaľovacieho motora smeruje do zotrvačníkového akumulátora.
- Rozbeh nadstavby – Energia zo zotrvačníkového akumulátora a z generátora spaľovacieho motora smeruje do motora nadstavby.
- Brzdenie nadstavby – Rekuperovaná energia z motora nadstavby a z generátora spaľovacieho motora smeruje do zotrvačníkového akumulátora.
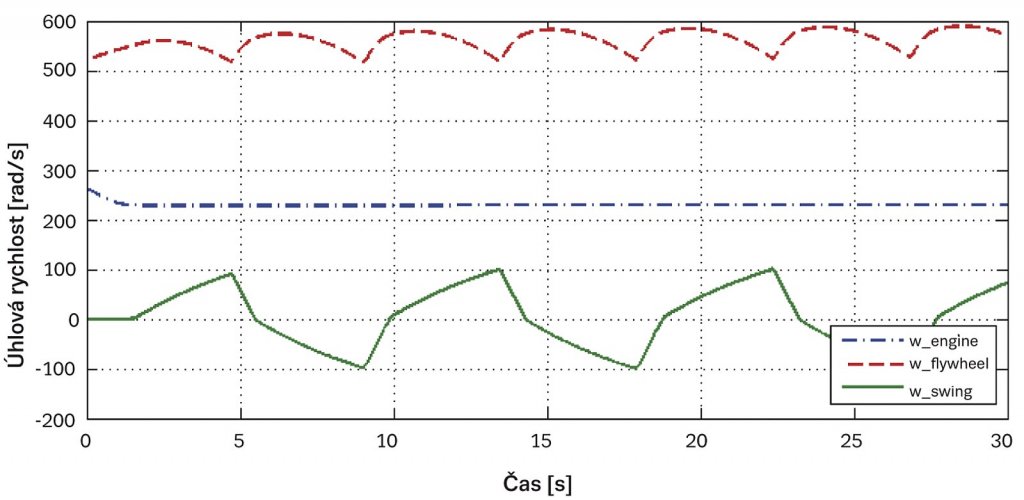
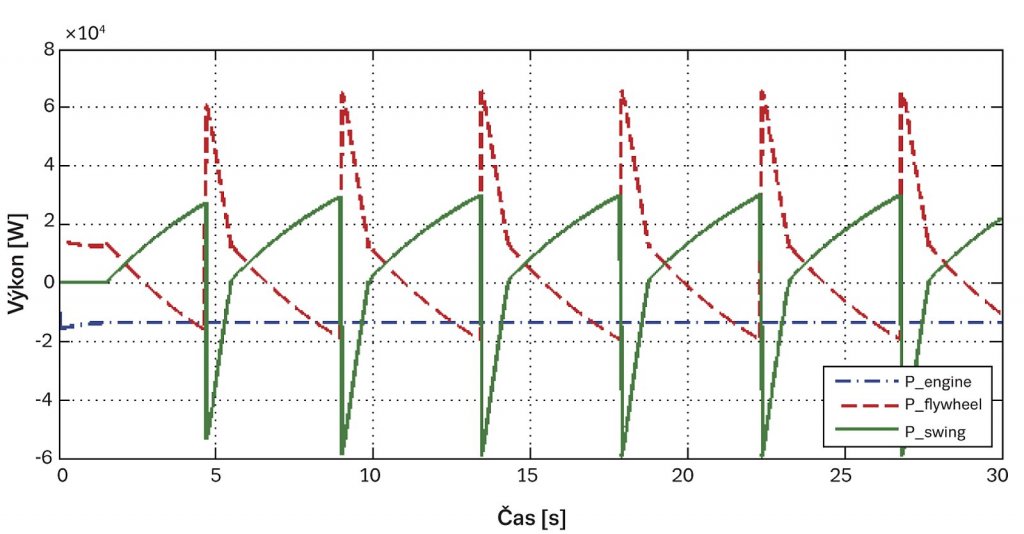
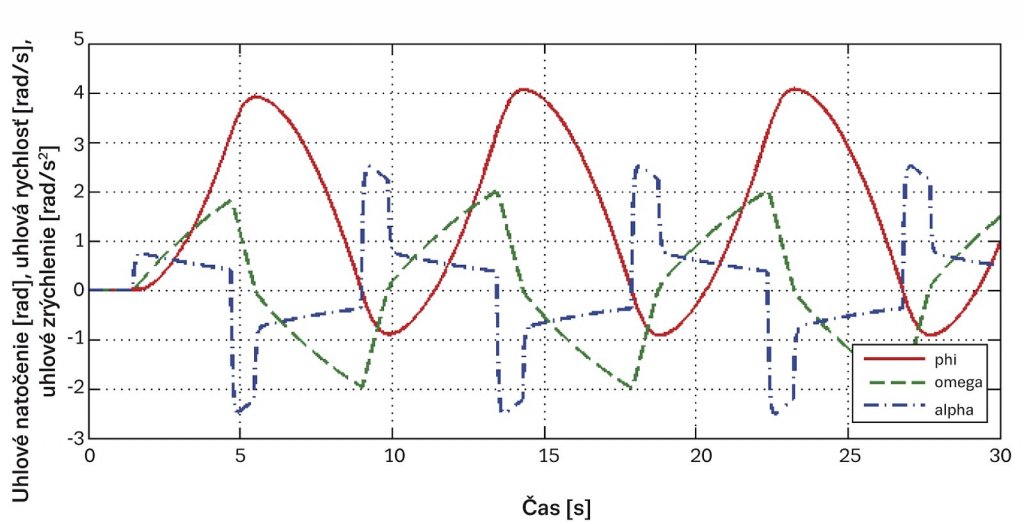
Simulácia pracovného cyklu spočívala v otáčaní nadstavby rýpadla, jej zabrzdení po dosiahnutí natočenia 180° a návratu nadstavby do pôvodnej polohy. Tento cyklus sa opakoval po dobu 30 sekúnd. Na numerické riešenie systému diferenciálnych rovníc bola využitá modifikovaná Rosenbrockova metóda (ode23s), schopná riešiť i numericky nestabilné úlohy.
Na záver možno konštatovať, že popísaný model hybridného pohonu nadstavby so zotrvačníkovým akumulátorom je vhodným nástrojom pre počiatočný návrh systému, identifikáciu jeho parametrov a následnú optimalizáciu pohonného systému. Prezentovaný matematický model je možné rozšíriť o model pohonu pracovného mechanizmu, prípadne o iné časti pohonného systému. Jednotlivé submodely je taktiež možné zdokonaľovať, či už ide o modely motorov, modely strát mechanických i elektrických, prípadne iné submodely. Ústav dopravnej techniky a konštruovania Strojníckej fakulty STU spolu s Ústavom energetických strojov a zariadení SjF STU spolupracujú na projekte experimentálneho zotrvačníkového akumulátora, ktorý je v súčasnosti rozpracovaný a po jeho dokončení bude možné identifikovať parametre systému a verifikovať výsledky simulácií. Aplikácie výsledkov experimentálneho výskumu zotrvačníkových akumulátorov by mali priniesť využitie práve v oblasti mobilných pracovných strojoch a v energetike.
Literatúra:
[1] Kertész, Milan. Hybridné rýpadlá – nová éra mobilných pracovných strojov. In Magazín stroje a mechanizácia. Roč. 11, č. 3 (2016), s. 40-42. ISSN 2453-7500.
[2] Guzzella, L and Sciarretta, Antonio, 2005, Vehicle propulsion systems. Berlin : Springer.
[3] Dhand, A. and Pullen, K., 2015, Review of battery electric vehicle propulsion systems incorporating flywheel energy storage. International Journal of Automotive Technology. 2015. Vol. 16, no. 3, p. 487-500. DOI 10.1007/s12239-015-0051-0. Springer Science + Business Media
[4] Gao, Hui, Zhai, Chang Guo, Chen, Liang Liang and Li, Huai Liang, 2012, Research on Maglev Flywheel Energy Storage System for Electric Vehicle. AMR. 2012. Vol. 608-609, p. 1078-1085. DOI 10.4028/www.scientific.net/amr.608-609.1078. Trans Tech Publications
[5] Xiao, Qing, Wang, Qingfeng and Zhang, Yanting, 2008, Control strategies of power system in hybrid hydraulic excavator. Automation in Construction. 2008. Vol. 17, no. 4, p. 361-367. DOI 10.1016/j.autcon.2007.05.014. Elsevier BV



