

Stavební stroje stále více využívají moderní lokalizační a řídící technologie. Nejvyššího stupně automatizace se v současné době dosahuje u kontinuálně pracujících stavebních strojů, kde je tento trend nejvíce patrný u strojů pro stavbu komunikací jako jsou grejdry, finišery, hutnící válce a také silniční frézy. Právě zde je vyžadována velká přesnost výstupních parametrů stroje, a tak je v tomto případě i přes jistou nákladnost při implementaci těchto moderních systémů dosahováno výrazných úspor. S ohledem na podmínky České republiky je zde větší pozornost věnována zvláště vibračním válcům jako zástupcům kontinuálně pracujících stavebních strojů. U tohoto stroje, na který se dá nahlížet jako na mechatronickou soustavu řídících a akčních členů, jsou s ohledem na požadavky na provoz stroje nejdůležitějšími parametry lokalizace stroje a kontinuální určení míry zhutnění upravovaného podloží.
Určování míry zhutnění
Zásadním problémem hutnící techniky je stanovení míry zhutnění podloží. Tento problém se ve značné míře projevuje zejména u nehomogenních materiálů jako jsou zeminy, jejichž vlastnosti mají značný rozptyl. Problém však nastává i u asfaltových těles, protože pokud použijeme metodu měření odskoků běhounu, jsou hodnoty částečně ovlivněny podkladovou vrstvou.
Mimo využití odskoků se v poslední době objevují pokusy o využití ultrazvuku a mikrovlnného záření. Zvláště u ultrazvuku jsou problémy s tím, že pokud není vysílač v přímém kontaktu s měřeným povrchem, dochází k velkému zkreslení díky velkému rozptylu a částečnému pohlcení měřících vln. Naopak např. dle Jaselkise se zdá, že při využití mikrovlnné technologie je možné tato měření provádět kontinuálně a je zde patrná korelace mezi rozptylem odražených vln a obsahem vzduchu respektive hodnotou zhutnění měřeného materiálu. Jedná se však o prototypy, které narozdíl od měření odskoků běhounu nejsou v současnosti používány.
Simulace zhutnění podloží v interakci s vibračním válcem
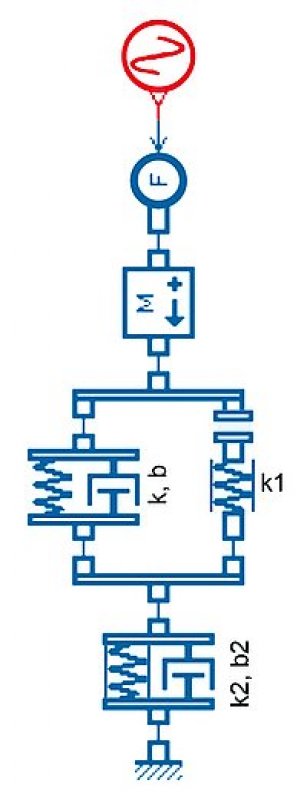
Jak už bylo naznačeno, nejpoužívanější metodou pro určení míry zhutnění je měření odskoků běhounu. Pro získání korektní hodnoty zhutnění je třeba teoreticky ověřit vhodnost použitých algoritmů na modelu zeminy a budiče vibrací. Tento model je proveden v programu AMEsim a zeminu nahrazuje tzv. Bartheltův model doplněný o tlumení z důvodů stability výpočtů (obr. 1). Simulovány jsou dva stejné přejezdy s časovou prodlevou 6 vteřin. Hodnoty tuhostí (k, k1, k2) jsou použity dle Barthelta, tlumení je nastaveno na cca 2 až 5 % hodnot tuhostí. Běhoun působí na zeminu silou od budiče vibrací zvětšenou o tíhu části stroje (běhoun + část rámu). Tato síla má své maximum s nárůstem a klesáním sinusového průběhu v závislosti na čase a tedy i vzdálenosti od místa přejezdu. Hodnoty hutnících účinků odpovídají tahačovému vibračnímu válci.

Obr. 1 Schéma v programu AMEsim
Nevratné pružiny (tuhosti k1 a k2) jsou modelovány pomocí spojení jiných než jen mechanických prvků s odpovídajícími vlastnostmi (plasticita). Tyto prvky jsou podstatou celého modelu umožňujícího dosáhnout postupného zvyšování stupně zpracování (zhutnění) materiálu.
Zhutnění a tedy zmáčknutí zpracovávaného materiálu (zeminy) je v tomto modelu větší než reálné, což je způsobeno malým předpětím hutněného povrchu (velmi nakypřený materiál). Z výsledků je však zřejmé (obr. 2), že při zmáčknutí zeminy větším než 20 mm už dochází k hutnění pouze v okolí maximální hutnící síly a zhutněnost zeminy je zde už více patrná. Jak je uvedeno výše, vhodným ukazatelem míry zhutnění nehomogenního podloží je odskočení běhounu (obr. 3) od povrchu, což je mimo to rovněž závislé na působící síle a na vzdálenosti této síly od zpracovávaného místa. Při menším zhutnění nedochází k tak výraznému odskoku jako u většího. To je patrné z grafu (obr. 3), kdy maximální odskok při prvním přejezdu vibračním válcem je menší než při druhém přejezdu. Ve skutečnosti není odskok běhounu tak značný a naopak rozdíl odskoků mezi jednotlivými přejezdy je výraznější. To však lze ovlivnit nastavením jednotlivých parametrů modelu. Taktéž lze nastavit jisté předhutnění zeminy. Omezením takto vytvořeného modelu při těchto simulacích je časová náročnost výpočtů.

Obr. 2 Přetvoření hutněného podkladu
Metody přesné lokalizace stroje
Pro přesné určení polohy se v dnešní době využívá několik základních metod, které jsou různě přesné a technologicky a finančně náročné. Pokud se ve většině Evropy požaduje horizontální přesnost pro vibrační válce do 10 cm a vertikální v řádu centimetrů, musí použitá metoda respektovat požadované tolerance pro stavební těleso.
Nejjednodušším způsobem jak zaručit definovanou polohu stroje je využití tzv. vodících drátů, které se musí poměrně pracně instalovat na staveništi. Pokročilejší variantou této technologie jsou tzv. virtuální dráty, kdy ocelová lanka nahradíme laserem a tím jsme schopni po instalaci snímače laseru na stroj dosáhnout vytyčení přímého směru. V případě požadavku na dodržení jen výškových parametrů je možné využít k řízení rotační laser, kdy vytvoříme na staveništi virtuální rovinu a tu můžeme využívat i několika stroji. Nevýhodou je, že za zhoršených podmínek se snižuje účinnost využití této technologie. Zvýšená přesnost je dosažena za cenu dlouhého sestavovacího času a s tím souvisí i ekonomické náklady.

Obr. 3 Odskok běhounu
Vhodným kompromisem při řízení polohy stavebních strojů je využití robotické totální stanice. Jedná se v podstatě o teodolit, který je doplněn o laserovou technologii, schopný snímat vlastní úhel natočení. Stroj i totální stanice je vybavena přijímačem/vysílačem pro komunikaci mezi stavebním strojem a stanicí. Stanice pak vyhodnotí rozdíl mezi vyslaným paprskem a paprskem odraženým od terče stroje. Na základě známé polohy robotické totální stanice a rozdílu paprsků stanice vyhodnotí polohu stroje a předá ji například pomocí ultrazvuku stavebnímu stroji. Nevýhodnou je úzká vazba totální stanice na stroj.
V poslední době se stále více prosazuje využití GPS (Global Positioning System), který určuje polohu téměř kdekoliv na zemském povrchu bez ohledu na počasí a na dobu měření. Tento systém je schopen určit spolehlivě polohy stroje, pokud je splněna podmínka viditelnosti čtyř družic (v případě dosahu tří družic systém určí 2D polohu). Tato podmínka omezuje práci v hlubokých údolích a členitém terénu, což se dá řešit instalací dalších přídavných senzorů, jako je snímač ujeté vzdálenosti a další senzory. Toto uspořádání koresponduje s obr. 4. Celý systém je pak založen na využití Kalmanova filtru, který porovnává údaje z GPS a externích senzorů s virtuálním modelem stavebního tělesa a následně doplňuje a zpřesňuje případné neúplné informace o poloze. Systém využívá referenční GPS stanici, která koriguje údaje od GPS přijímače na stroji. Tato stanice může komunikovat se strojem pomocí GSM, a tak není podmínkou aby byla umístěna přímo na stavbě, tzn. že může být využívána několika staveništi a mnoha stroji zároveň, což je ekonomicky výhodné. Hlavní výhoda při využití technologie GPS je v tom, že se minimalizují náklady na přípravu staveniště, protože je využívám virtuální model, který umí využívat jak stroj, tak i ostatní příslušenství staveniště (referenční stanice).

Obr. 4 Schéma modelu stavebního stroje s GPS navigací
Nové lokalizační technologie a systém kontinuálního zjišťování zhutnění podloží umožňují zvýšit efektivitu a kvalitu práce a zároveň snižují ekonomickou náročnost nejen na provoz stroje, ale především na přípravu a vytyčení staveniště. Zároveň je možné díky využití vhodné řídící elektroniky vytvářet bezprostředně po ukončení prací protokol obsahující kvantitativní i kvalitativní údaje o provedené stavbě.
Spojením systémů přesné lokalizace ve spojení s relevantními údaji o velikosti zhutnění podloží (ať už se jedná o zeminu nebo o asfaltový povrch) vzniká mechatronická soustava schopná minimalizovat počet přejezdů potřebných k dosažení požadovaného stupně zhutnění. Při využití nízkonákladových součástí a vhodného matematického aparátu je možné dostatečné přesnosti stroje dosáhnout bez výrazného navýšení celkové ceny stroje.
Publikovaných výsledků bylo dosaženo za podpory Ministerstva školství, mládeže a tělovýchovy České republiky, výzkumný záměr MSM 0021630518 „Simulační modelování mechatronických soustav”.



